一般角
角度を拡張する
小学校のときより慣れ親しんできた角度。
一回転を \(360°\) と決め、\(0°\) から \(360°\) で定義しました。
この角度を拡張します。
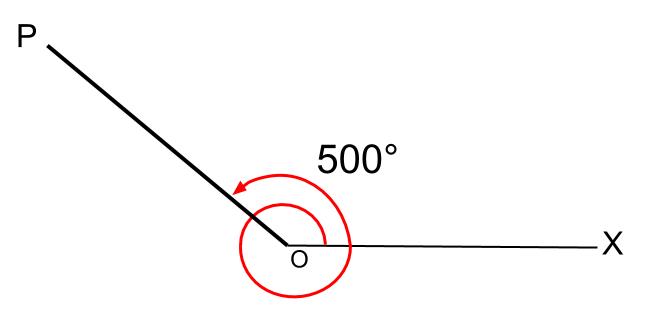
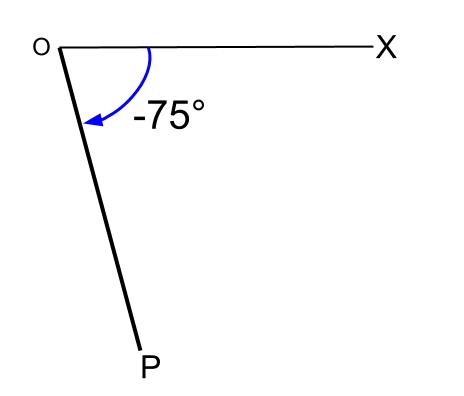
\(-75°\) や、\(500°\) など、
あらゆる実数に対応できるような角を定義し直すことにします。
動径と始線
平面上で、点 \(O\) を中心に回転する線分 \(OP\) を考えます。
この \(OP\) を動径といいます(動く半径です)。
この \(OP\) を動径といいます(動く半径です)。
\(OP\) の最初の位置を始線といい \(OX\) で表します。
\(OP\) が反時計回りにまわると正の角
\(OP\) が時計回りにまわると負の角
と、角の正負を決めます。
動径 \(OP\) の回転した向きと大きさを表した角を一般角といいます。
これで、\(360°\) 以上の角や、負の角も定義されました。
具体例で見ていきましょう。
例1 \(500°=360°+140°\)
例2 \(-75°\)
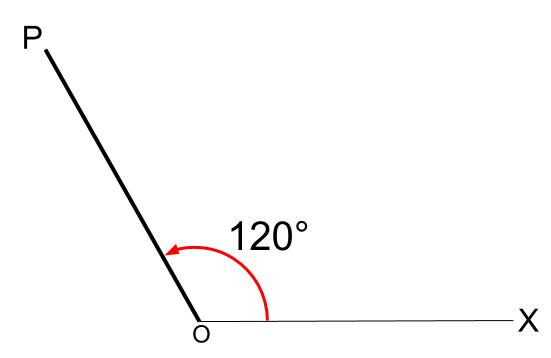
例3 \(120°\)
(一般角は、従来の角 \(0°~360°\) を含みます。)
動径 \(OP\) の表す角
動径は \(360°\) 回転するともとの位置に戻るので、
例えば \(45°\) の動径と、\(45+360=405°\) の動径は一致します。
また、\(45-360=-315°\) の動径も一致します。

つまり、動径 \(OP\) が与えられても、
その動径が表す角は \(1\) つには定まらりません。
そのため、
\(\theta=\alpha+360°×n\) \((nは整数)\)
のように、無数の角を \(1\) つの式で表します。
\(45°=45°+360°×0\)
\(405°=45°+360°×1\)
\(765°=45°+360°×2\)
\(-315°=45°+360°×(-1)\)
のような無数の角を、
\(\theta=45°+360°×n\) \((nは整数)\)
のように一まとめに表します。
しっかり覚えておきましょう。